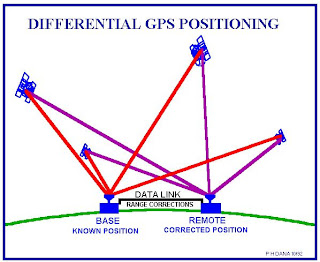
หลักการของ
DGPS ก็คือว่า ถ้าจีพีเอสสองตัวอยู่ในระยะที่ใกล้กัน2-300 กิโลเมตร จะต้องมีค่าความผิดพลาดที่เกิดจากชั้นบรรยากาศ วงโคจร สัญญานนาฬิกาบนดาวเทียมและเครื่องรับ รวมทั้งความคลาดเคลื่อนอื่นๆ ที่ใกล้เคียงกัน ดังนั้นเมื่อเอาจีพีเอสหนึ่งตัวไปวางไว้ ณ ตำแหน่งที่ทราบค่า เช่น หมุดของกรมที่ดินเรียกว่า Base GPS หรือ กรมแผนที่ทหาร แล้วให้เอาจีพีเอสอีกหนึ่งตัวที่ต้องการวัดค่าตำแหน่งของวัตถุใดๆในสนามไปวางไว้ณตำแหน่งที่ต้องการทราบค่าเรียกว่า Rover GPS จากนั้นทำการบันทึกข้อมูลสัญญานที่ได้รับทั้งสองตัว เพื่อนำไปปรับแก้หลีงจากทำการรังวัดตำแหน่งเสร็จในสำนักงานอีกครั้ง
หรือ หากมีสถานีที่ทราบค่าพิกัดแน่นอนแล้วให้บริการส่งสัญญานวิทยุส่งค่าปรับแก้ให้กับตัว Rover ก็จะปรับแก้ความถูกต้องเชิงตำแหน่งณเวลานั้นๆได้แบบเรียบไทม์ เรียกว่า RealTimeDGPS ที่ให้ค่าความถูกต้องระดับเซนติเมตร หรือ มีตัว Base กับ Rover แล้วทำอุปกรณ์เชื่อมต่อเพื่อรับสัญญานวิทยุเพื่อปรับแก้ตัว Rover
อ่านเพิ่มเติม
1.
ESRI
2.
DGPS
3.
GPS ดีมากๆ
4.
Trimble tutorial มีแอนิเมชั่นให้ดูด้วยครับ
ไม่มีความคิดเห็น:
แสดงความคิดเห็น